Aim
To gain a basic understanding of the principles of electric motors, specifically the types commonly used in small unmanned aircraft. Also, to gain a sound understanding of the considerations and concerns present when working with electric motors and the effects they can have on other on-board systems.
Objectives
At the end of this briefing you will be able to:
- Discuss the BASIC principles of operation of an electric motor, of the types commonly used in small unmanned electric aircraft
- Understand Voltage, Current and Resistance
- Describe how to reverse the direction of rotation of the electric motors discussed
- List and describe the considerations and concerns when working with electric motors and their associated equipment
- Nominate the implications and possible effects on other equipment on-board the aircraft when an electric motor is used
Electricity
Describing Electricity
Voltage: The potential difference in charge between two points in an electrical field (also called electromotive force).
Current: The rate at which electric charge flows past a point in a circuit. In other words, current is the rate of flow of electric charge.
Electrical impedance: The measure of the opposition that a circuit presents to a current when a voltage is applied.
Resistance: Once of the forms of impedance.
The Water Analogy
Consider a water tank at height above the ground. At the bottom of this tank there is a hose.
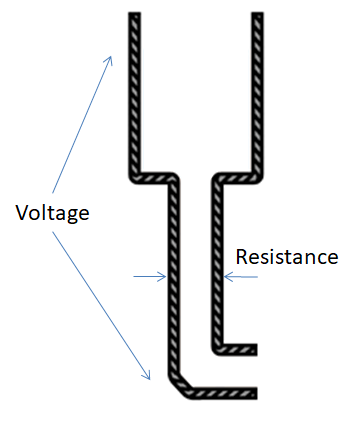
The pressure at the end of the hose represents voltage.
The water in the tank represents charge. The more water in the tank, the higher the charge, the more pressure is measured at the end of the hose.
Resistance is similar to the size of the hose. A big hose means lots of water flows (LOW resistance). A small hose means only a little water flows (HIGH resistance).
Think of this tank as a battery! We store energy, and then release it. If we drain some of the water out of our tank the pressure created at the end of the hose will go down. This represents decreasing voltage.
The Formula
Voltage = Current x Resistance
Or: V = IR
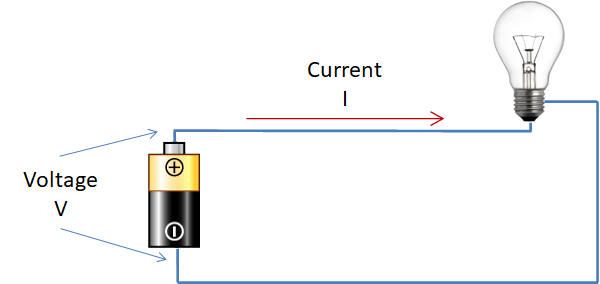
If the battery is at 1.5V, and the lamp draws 0.5A, the RESISTANCE is:
V=IR
Then,
R=V/I
Therefore,
R = 1.5/0.5 = 3 Ohms (Ω)
Electric Motors
How Does an Electric Motor Work?
The answer is a circuit and magnets!
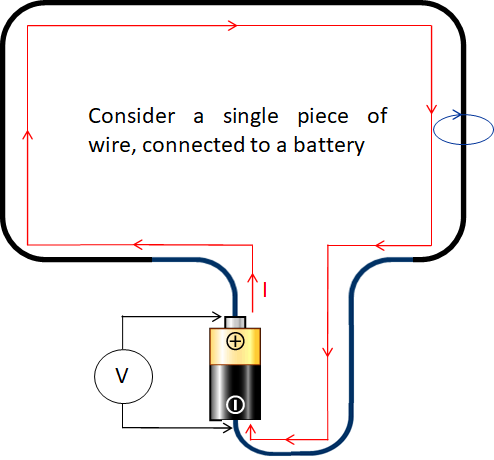
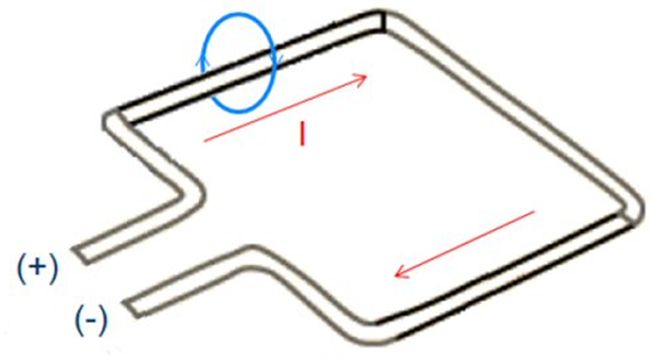
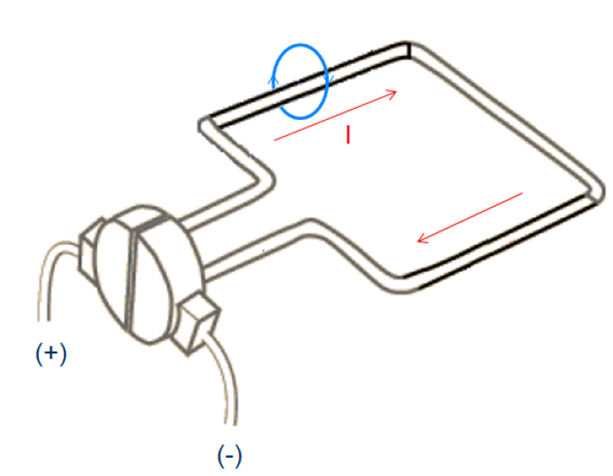
The voltage across the battery will cause a current (“I”) to flow through the wire.
Current flowing through the wire will cause a magnetic field to be created around the wire.
The Permanent Magnet DC Motor
The heart of any motor! A Direct Current (DC) motor uses a current flowing in one direction to cause the motor to spin.
When a current is passed through a coil of wire it becomes an “electromagnet”!
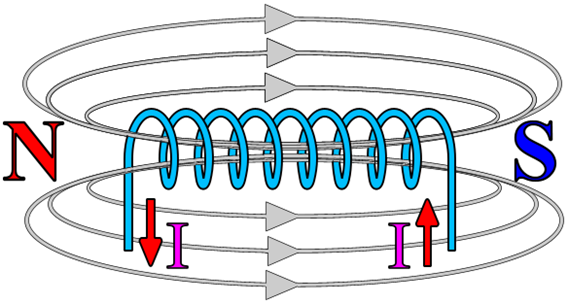
Using a simple wire will work, but not very well. Placing a (ferrite based) core in the coil concentrates and focuses the magnetic field.
This is very predictable, and the “Right Hand Rule” can be used to determine the “North pole” and the “South pole”.
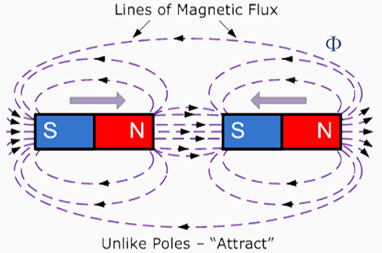
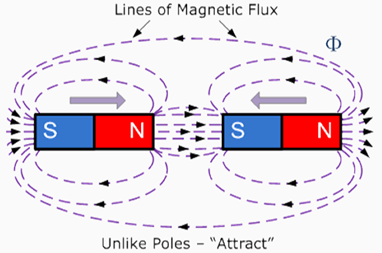
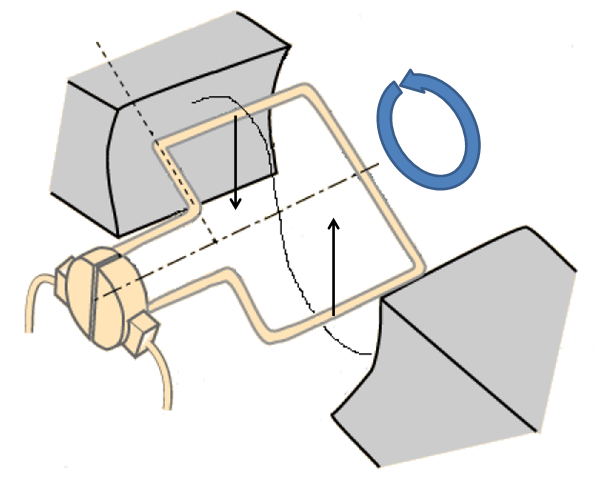
Magnetic Attraction & Repulsion
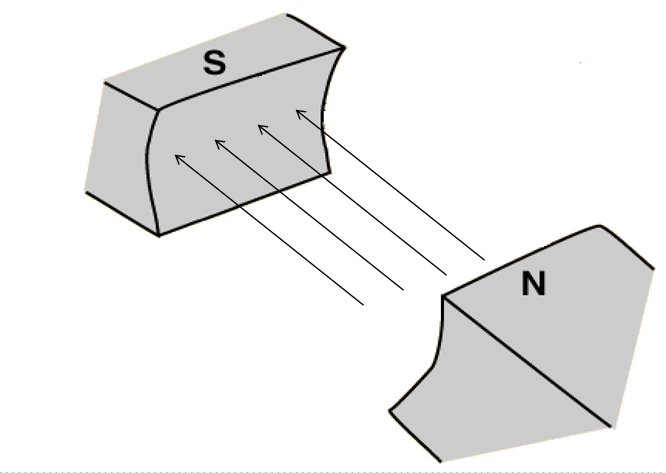
A Simple Motor (Magnetic Field)
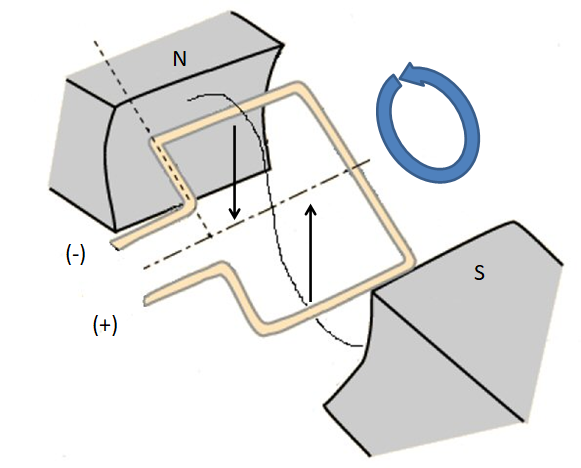
To get the DC motor to keep spinning (and not “elastic band”), then we need to switch the direction of the current!
This is usually done with brushes and a commutator.
Three-Phase Motors
What is a Three-Phase Motor?
What if we don’t want to use brushes and a commutator (as these will wear out eventually)?
A three-phase motor uses alternating current in a specific manner to avoid needing brushes and a commutator!
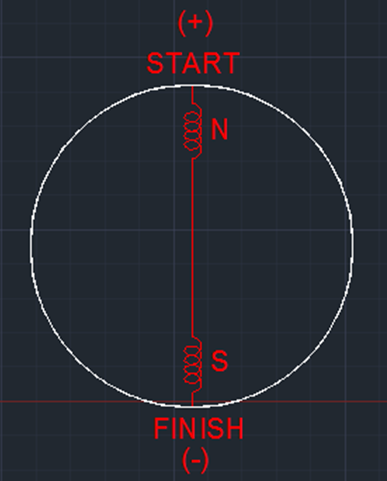
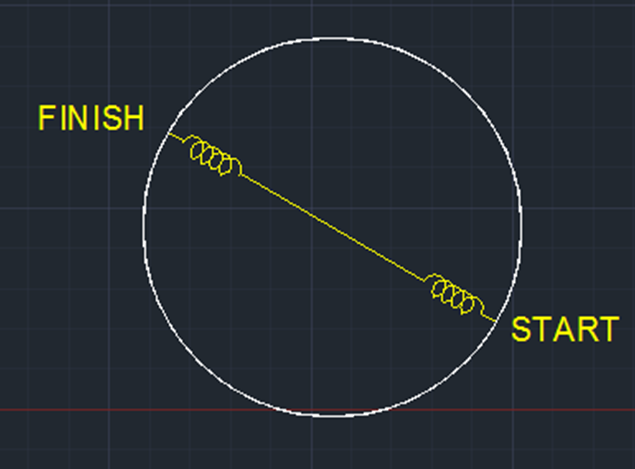
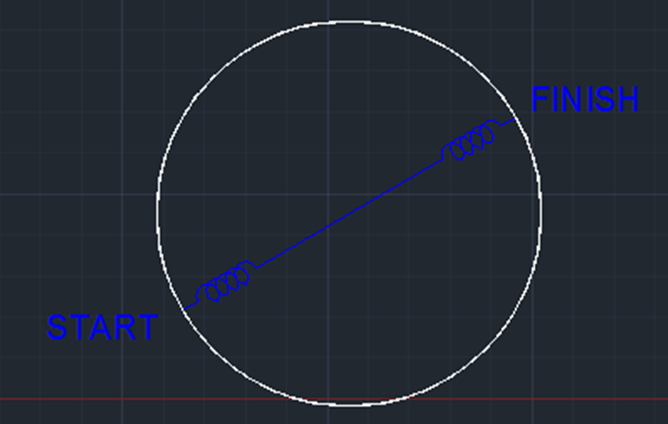
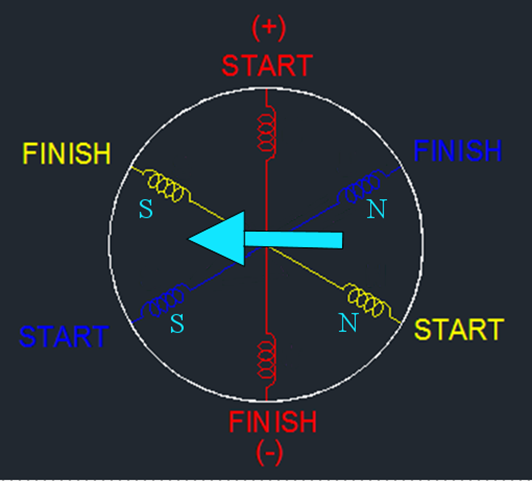
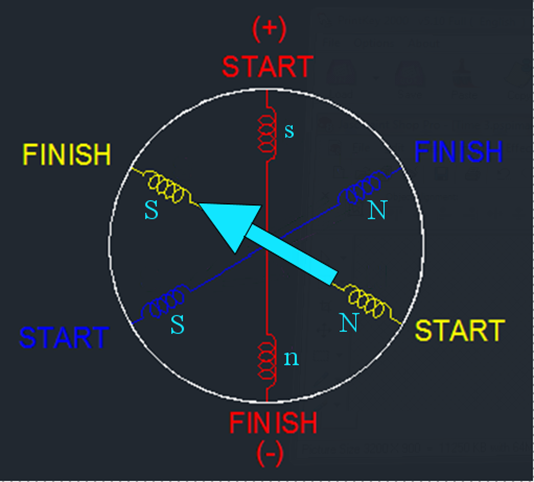
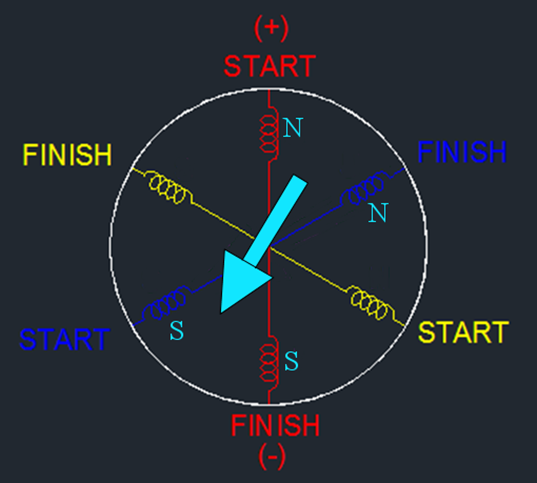
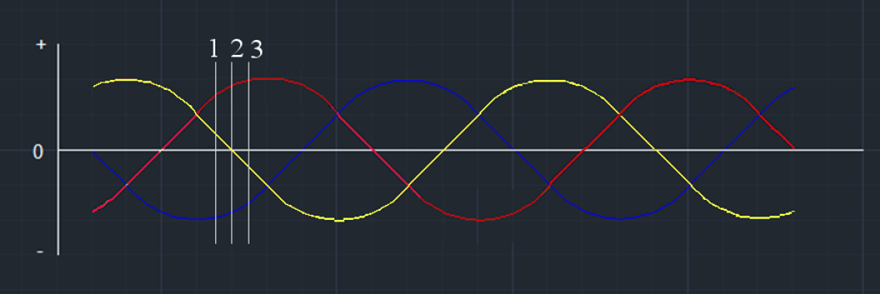
The Basic Principles
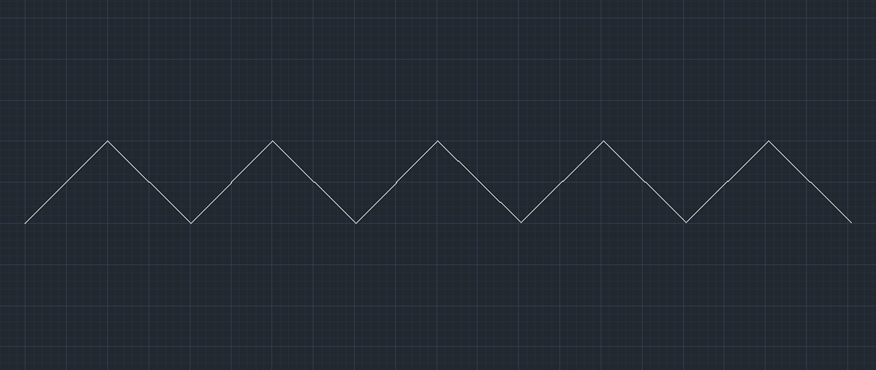
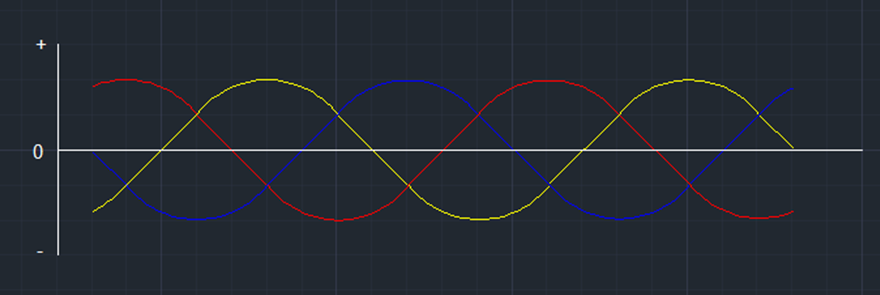
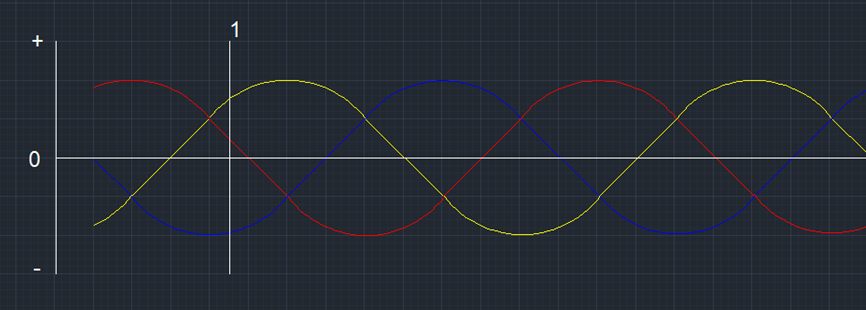
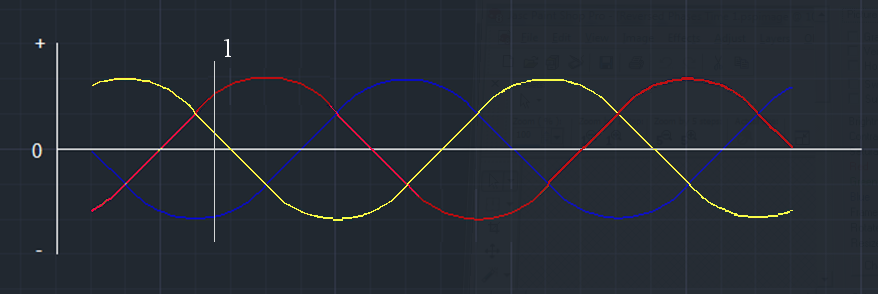
Putting the Phases Together
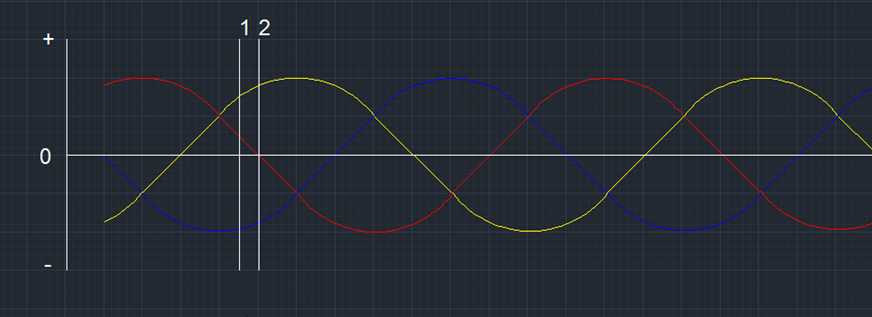
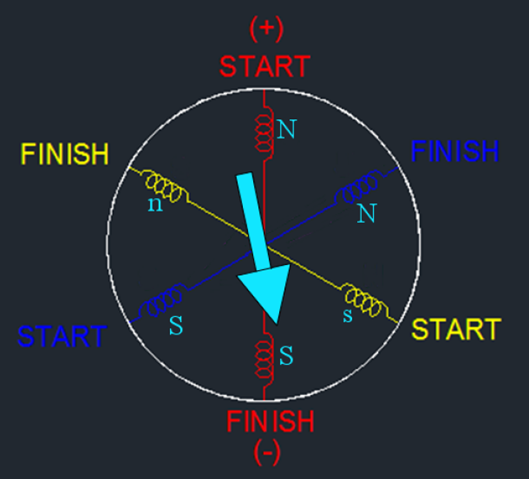
Making it Spin – Time Interval 1

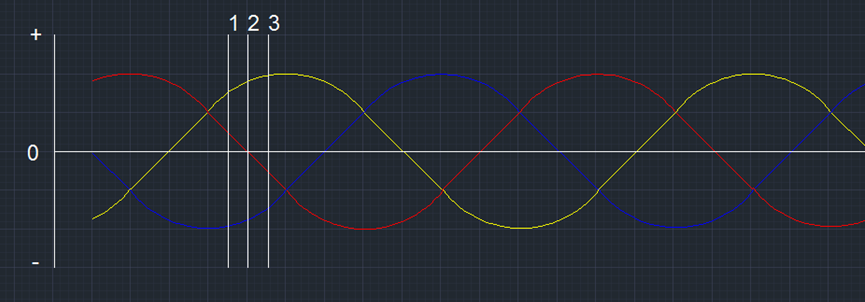
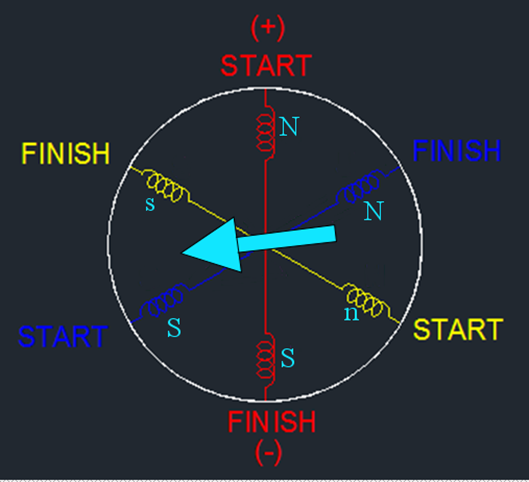
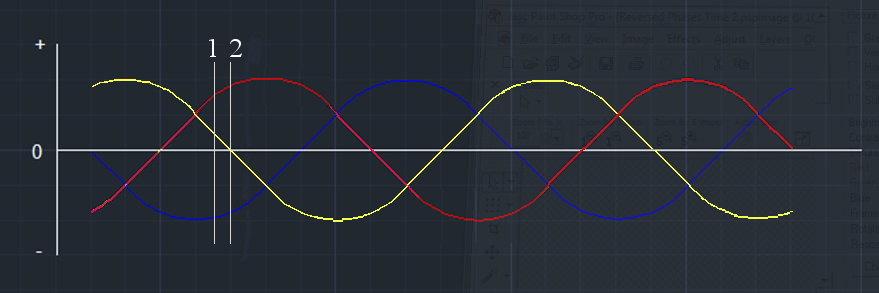
Making it Spin – Time Interval 2
Making it Spin – Time Interval 3
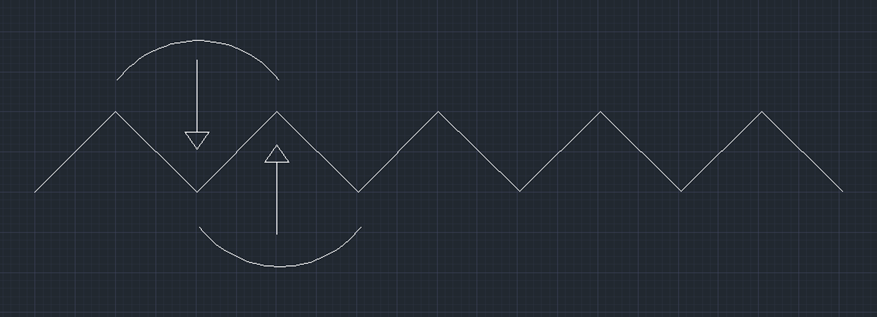
Reversing the Spin Direction
To reverse any 3 phase motor swap any two phases!
Making it Spin in Reverse – Time Interval 1
Making it Spin in Reverse – Time Interval 2
Making it Spin in Reverse – Time Interval 3
Three-Phase Motors for Small Unmanned Aircraft
Brushless Electric Motors
Brushless electric motors come in several different physical configurations.

In the inrunner configuration, the permanent magnets are part of the rotor. Three stator windings surround the rotor.
In the outrunner configuration the stator coils form the centre (core) of the motor, while the permanent magnets spin within an overhanging rotor which surrounds the core.
Common Terms – The “kV Rating”
The term “kV” – as generally used by hobbyists – refers to the so-called rpm constant of a motor.
Expressed in the most simple terms, this alludes to the number of revolutions per minute that the motor will develop when 1V (one Volt) is applied to the motor with no load attached.
A motor with a kV rating of 4600, and a 12V supply, 4600 x 12 = 55,200 RPM. This is the maximum RPM the motor can achieve under no load.
What does this mean?
- A motor with a higher kV will have more top end speed, but not as much acceleration/torque
- A motor with a lower kV will not be as fast, but will accelerate faster.
- The KV figure allows a comparison of similar motors!
Common Terms – Motor Turns
Motor Turns is the same for either brushed motors or brushless motors. The word “turns” stands for the number of turns of wire around each of the motor’s rotor poles.
- The higher the number of wirings/turns means less top speed, but higher acceleration/torque.
- The lower the number of turns equals higher top end speed and lower torque/acceleration.
For example, a motor with a turn rating of 5.5 will have less acceleration/torque but higher top speed than a motor with a 12 turn rating.
Common Terms – Current Rating (Amps)
The max current rating is the maximum amount of current that a motor is able to handle safely. This current is measured in Amps. The continuous current rating of a motor is the Amps that a motor can handle safely over a long period of time.
It is a great idea to find an ESC that has a current rating that is higher than your motor by at least 20%. It will be a good safety cushion.
The estimated current rating of a motor is usually on the factory specs sheet, however other factors affect the actual current that a motor will draw. Such things typically include the kV rating of the motor, the battery voltage, how heavy the aircraft is, prop size. The harder a motor needs to work to reach it’s top speed, the higher the current will be.
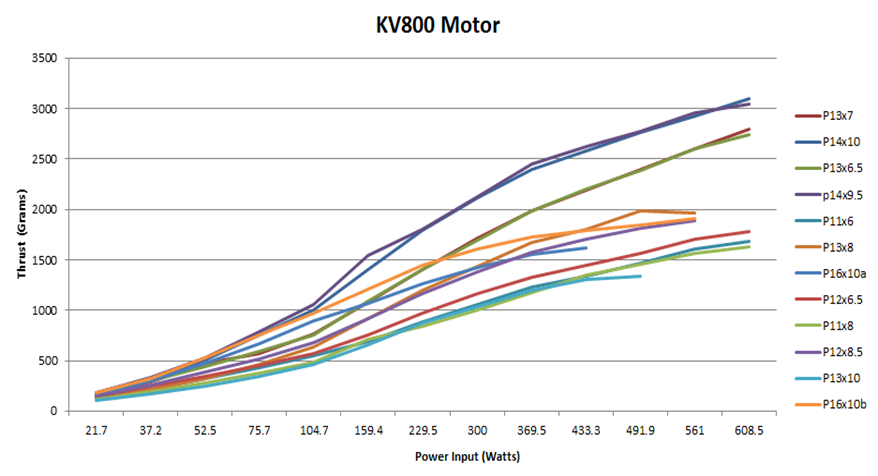
Common Terms – Watts
Watts are the power rating of the Motor.
The simple math here is Amps x Volts = Watts.
The motor should have a watt rating on its specification sheet, e.g. “180W”. This is the amount of power that the motor should produce safely. Running anything over this rating could damage the motor, especially over an extended period.
Common Terms – Motor Efficiency
The efficiency of a motor is generally a function of the quality of the motor. A 70% efficient motor produces 70% power and 30% heat. A 85% efficient motor produces 85% power and 15% heat.
If the battery is supplying the Motor/ESC combination with 180 watts, an 85% efficient system will produce 153 watts (85%) power, with 27watts of heat. (27 Watts of heat is capable of melting solder).
A Typical Brushless Motor

Motor Specifications:
- Turns: 24T
- Voltage: 2~3S LiPo (7.4~11.1V, max: 12.6V)
- RPM/V: 1340kv
- Internal resistance: 0.052 Ohm
- Max Loading: 28A
- Max Power: 375W
- Shaft Dia: 4.0mm
- Bolt holes: 25mm
- Bolt thread: M3
- Weight: 76g
- Motor Plug: 3.5mm Bullet Connector
Summary
You should now be able to:
- Discuss the basic principles of operation of an electric motor, of the types commonly used in small unmanned electric aircraft.
- Describe how to reverse the direction of rotation of the electric motors discussed.
- List and describe the considerations and concerns when working with electric motors and their associated equipment.
- Nominate the implications and possible effects on other equipment on-board the aircraft when an electric motor is used.